 번역 제공
번역 제공- 거미 감각기관 모사·인간 피부 콜라겐층 착안, 외부 환경 신호 로봇에 전달
- 소형 로봇 적용으로 군사·산업·수색 분야 로봇의 획기적 발전 기대
아주대 연구팀이 소형의 지상 로봇에 적용할 수 있는 고내구성·고감도의 촉각 센서를 개발했다. 이 센서는 군사·산업·수색용 소형 로봇이 외부의 신호를 안정적으로 전달하고 제어하는 데 활용될 수 있을 전망이다.
24일 아주대학교(총장 최기주)는 강대식 아주대 교수(기계공학과)팀이 거미의 감각기관을 모사한 기존 초고감도 변위 센서의 내구성을 높여 로봇에 실제 적용하고, 지면 상태를 분류해내는 데 성공했다고 밝혔다. 해당 연구 성과는 전자공학 분야 최상위권 저널이자 네이처 자매지인 <npj 플렉시블 일렉트로닉스(npj flexible electronics)> 4월20일 자에 온라인 게재됐다.
논문의 제목은 “소형 지상 로봇에 적용 가능한 고내구성 생체모방 크랙 기반 촉각센서 (Ultra-stable and tough bioinspired crack-based tactile sensor for small legged robots)”다. 이번 연구에는 아주대 기계공학과 김태위 연구원과 박사과정의 홍인식·김민호·임성훈 학생이 제1저자로 참여했다. 아주대 기계공학과의 강대식·고제성·한승용 교수가 교신저자로 함께 했다.
촉각 센서(tactile sensor)는 로봇의 제어에 활용되는 필수적인 요소로 학계와 산업계에서 활발한 연구가 진행되어 왔다. 촉각 센서는 로봇이 구동될 때에, 외부 환경으로부터 물리적으로 주어지는 다양한 신호들을 전달해 주고, 로봇이 환경과 상호작용하도록 돕는 역할을 한다.
그 중 스케일이 작은 사람 손바닥 크기 이하 수준 소형 지상(small legged) 로봇의 경우, 촉각 센서를 통한 지면과의 물리적인 상호작용 정보가 로봇의 최적 구동 제어에 있어 필수적이다. 스케일이 비교적 큰 지상(legged) 로봇의 경우에는 로봇 관절부의 힘을 측정하는 토크 센서, 로드셀 등이 활용될 수 있지만, 이 경우 소형화·유연화하기는 쉽지 않다.
이처럼 기존에 활용되어온 센서들은 소형화와 내구성뿐 아니라 유연성과 민감도 측면에서 여러 한계를 보여왔다.
이에 아주대 연구팀은 기존에 개발했던 거미의 슬릿(slit) 구조 모사 변위 센서를 기반으로, 내구성을 더욱 확보하는 방안을 모색해왔다. 기존의 변위 센서는 민감도에 있어 세계 최고 수준을 보였으나, 반복 측정에 대한 내구성 확보가 쉽지 않았다. 슬릿(slit)이란 거미의 다리 관절마다 존재하는 감지 기관으로, 거미는 미세한 슬릿을 활용해 거미줄의 진동을 감지, 먹잇감을 포식하거나 포식자로부터 탈출할 수 있다.
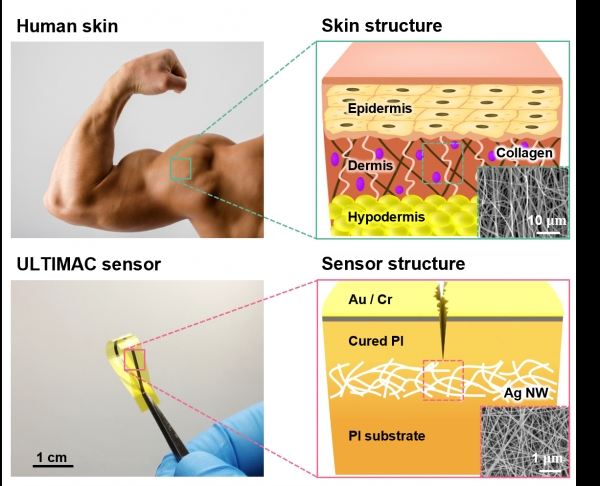
연구팀은 기존 센서의 한계를 극복하기 위해 인체 피부의 콜라겐 층에 주목했다. 선행 연구 조사와 파괴역학 시뮬레이션을 통해 콜라겐의 섬유 조직들이 우리 피부의 높은 인열저항(tear resistance)에 큰 기여를 한다는 점을 확인한 것. 양쪽에서 당기는 힘인 인장력(Tensile Force)이 가해지면 피부의 콜라겐 층이 재정렬되면서, 이로 인해 응력 즉 단위면적당 작용하는 힘이 집중되지 않고 분산되는 원리다.
연구팀은 이러한 콜라겐 층의 역할에 영감을 받아, 유연한 폴리이미드 폴리이미드 : 높은 내열, 내화학성을 가지고 있어 유연전극에 광범위하게 활용되는 소재
필름 위에 폴리이미드 레진과 은 나노와이어 층을 쌓아 내구성을 높인 크랙 기반 크랙 기반 : 크랙(빈 틈)이 벌어짐에 따라 전기적인 저항이 변하는 것을 이용해 기계적 변형을 측정하는 방식
센서를 제작했다. 이후 연구팀은 새롭게 제작된 박막센서의 성능을 검증하기 위한 여러 실험을 진행했다. 그 결과 비전 센서나 가속도계, 자이로스코프 자이로스코프: 회전 운동에 따른 정보를 측정하는 센서
같은 보조 장치 없이 변위 센서만으로 민감도 척도인 게이지 팩터(Gauge factor, GF) 2000을 달성하고, 20만회의 반복 사이클에도 성능 유지가 가능함을 확인했다(0.5%의 인장변형률 기준).
더불어 새로 개발한 센서를 상용 지상 로봇에 부착, 소형 로봇 제어에 대한 활용성을 입증하는 데에도 성공했다. 연구팀은 로봇의 발바닥에 개발한 센서를 부착한 뒤 기계학습(Machine Learning)을 통해, 지면의 상태와 각도 그리고 로봇의 주행 속도를 오직 부착한 센서의 정보만을 가지고 분류해냈다. 지상 소형 로봇은 물리적으로 협소한 지역에서의 탐지나 데이터 수집 등을 위해 활용되며, 빠른 속도로 달려야 하기에 고도의 내구성이 필요하다. 이에 아주대 연구팀의 이번 성과는 앞으로 지상 로봇의 초소형화와 최적 움직임 구현 등에 적용될 수 있을 전망이다.
공동 연구팀를 주도한 강대식 교수는 “이번에 개발한 박막형 센서는 내구성과 민감도가 모두 우수하다”며 “지상 로봇에 사용되어온 범용 센서의 소형화를 위한 방안을 제시함으로써 로봇 제어에 있어 새 돌파구를 찾았다”고 설명했다.
강 교수는 이어 “단순 구동(locomotion) 혹은 단순 작업 수행(simple task manipulation)을 목표로 했던 기존 초소형 지상 로봇 연구에 새로운 바람을 불러일으키는 연구성과가 될 것”이라고 덧붙였다.
이번 연구는 산학연 주관 핵심기술 연구개발사업(사업관리기관: 국방신속획득기술연구원)의 ‘군사용 곤충형 지상이동로봇 기술개발’ 과제로 연구개발 주관업체인 LIG넥스원과 함께 수행되었다.
