 번역 제공
번역 제공어라운드 뷰, 3차원 지도 등 자율주행 및 운전자 보조기술 전반 활용
중앙대 시각및지능시스템 연구실 성과, IEEE TITS 10월호 출판
중앙대(총장 박상규)가 최근 각광받는 자율주행과 운전자 보조기술 전반에 활용 가능한 차량 카메라 교정 연구 결과를 발표했다.
중앙대는 ‘시각및지능시스템 연구실’ 소속 연구자 4명이 개발한 ‘각도를 활용해 차량 카메라의 방향을 추정하는 방법’을 담은 논문이 해당 분야 최고의 학술지인 IEEE TITS를 통해 출판됐다고 14일 밝혔다.
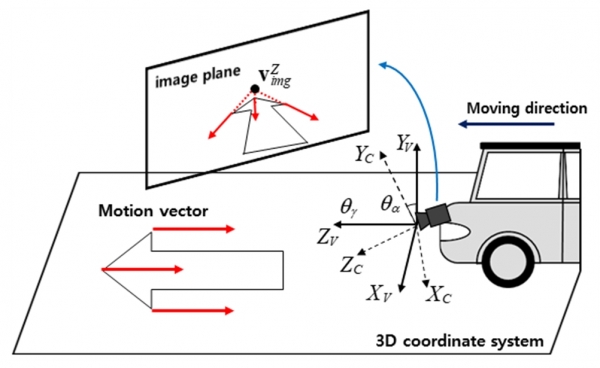
연구진은 직진으로 주행하는 차량의 운동방향과 평행선들이 2차원 영상에서 모이는 소실점이 평행한 특성, 차량의 3차원 축과 도심 내 건물 등 구조물들의 선분이 이루는 축 간의 기하학적 관계를 이용해 이번 연구 성과를 도출했다.
차량 카메라의 방향을 각도로 추정하는 해당 기술은 주차 시 차량 주변의 상태를 보여 주는 어라운드 뷰 모니터링(around view monitoring)을 비롯해 물체의 위치 측정, 3차원 지도 생성 등 차량 자율주행과 운전자 보조기술 전반에 있어 활용 가능성이 높을 것으로 기대를 모은다.
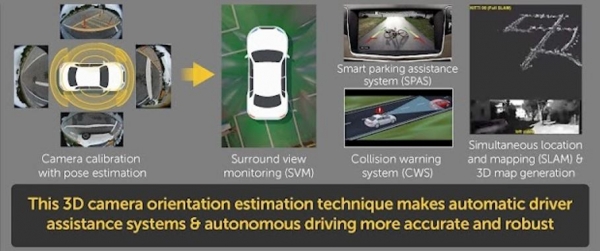
논문의 주저자인 장진범 박사는 “우리가 사는 세계는 3차원이지만, 영상은 이를 2차원 형태로 저장한다. 다시금 3차원 분석을 하기 위해서는 카메라의 각도를 추정하는 기술이 필요하다”며 “대표적인 운전자 보조기술 중 하나인 어라운드 뷰 모니터링도 사각을 전부 보기 위해서는 3차원적인 분석을 필요로 한다. 이외에도 여러 응용 분야에서 활용될 수 있는 기술”이라고 말했다.
연구의 상세 내용은 IEEE에서 출간하는 『IEEE TITS』 10월호를 통해 출판된 「자율주행 및 운전자 보조시스템을 위한 모션 기반 소실점 검출을 활용한 카메라 방향 추정 방법」 논문을 통해 확인 가능하다.
『IEEE TITS』는 IEEE 산하 ITS Society가 주관하는 학술지로 운송 시스템에서 활용 가능한 차량 설계, 데이터 분석 등 차량·운송 산업 전반에 사용되는 공학 기술 관련 연구 논문을 출판한다. 지난해 기준 인용 지수(Impact factor) 6.492를 기록하고 JCR 상위 10% 이내에 드는 등 해당 분야 최고의 학술지로 평가받고 있다.
이번 연구논문의 주저자는 중앙대 첨단영상대학원에서 영상학을 전공한 장진범 박사(중앙대 산학협력단 전임연구원), 중앙대에서 석사학위 과정을 밟으며 연구에 참여한 조영란 현 LG이노텍 연구원이 맡았다.
같은 연구실 소속 신민우 박사과정생과 연구실 지도교수인 백준기 교학부총장(AI 대학원장)도 교신저자로 연구에 참여했다.
저자들이 소속돼 있는 ‘시각및지능시스템 연구실’은 백준기 부총장이 지도하는 연구실로 AI대학원과 첨단영상대원 소속 박사후 연구원 3명, 박사과정 13명, 석사과정 16명으로 구성돼 있다.
현재 영상복원, 컴퓨터 비전, 인공지능 등의 기술을 융합한 다양한 연구를 진행 중이다.
박상규 중앙대 총장은 “시각및지능시스템 연구실이 새롭게 개발한 기술이 자율주행 등 차량 관련 여러 분야에서 폭넓게 활용되길 바란다. 뛰어난 연구성과가 지속적으로 도출될 수 있도록 물심양면으로 지원할 계획”이라고 말했다.
